

Department of Artificial Intelligence
Robotics Laboratory (Jointly with Department of Computer Science and Engineering)
List of Equipment with Specifications:
| • Kinova Gen 3 lite Robotic Arm Degrees of Freedom (DOF): 6 Payload: 0.5 kg (continuous) Total Weight: 5.4 kg (11.9 lbs) (Approx.) Maximum Reach: 760 mm. Maximum Speed: 25 cm/s. Power Consumption: ~20 W average | 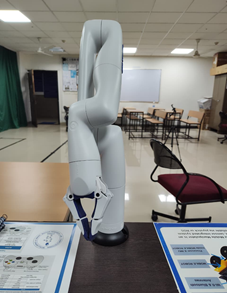 |
|---|---|
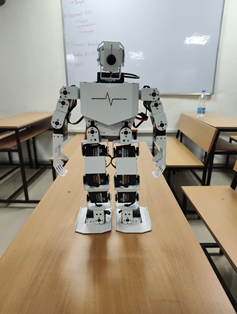
| • TonyPi Humanoid Robot Robot Type: Humanoid (biped) robot Purpose: Education, AI learning, robotics research Main Controller:Raspberry Pi (typically 4B/5) Programming Language:Python Libraries Used: OpenCV, MediaPipe Degrees of Freedom (DOF): Multiple DOF for legs, arms, and head movement Actuators servo motors Camera:HD camera with 2-DOF movement (pan & tilt) Sensors: IMU (for balance and orientation) |
 |
| • TurtleBOT3 Burger |
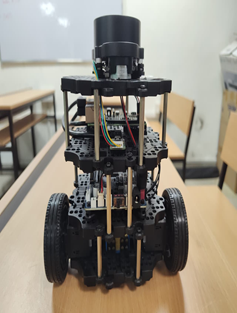 |
| Robot Type | Differential drive mobile robot (wheeled) |
| Developer | ROBOTIS (open-source platform) |
| Purpose | Education, research, ROS learning, prototyping |
| Architecture | Modular and customizable design |
| Main Controller (SBC) | Raspberry Pi |
| Motor Controller | OpenCR board |
| Operating System | Ubuntu |
| Middleware | ROS2 |
| Programming Languages | Python, C++ |
| Sensors | LiDAR, IMU |
| Perception Capability | Mapping, localization, obstacle detection |
| Navigation | Autonomous navigation using ROS2 Navigation Stack |
| Control Interface | Teleoperation /cmd_vel |
| Mobility | Two-wheel differential drive |
| Communication | Wi-Fi |
| Simulation Support | Gazebo, Webots |
| SLAM Capability | Yes |
| Expandability | Supports additional sensors |
| Applications | Navigation, mapping, obstacle avoidance |
| Key Advantage | Low-cost, open-source |
| Limitations | Limited payload |
| • NUGENIX |
 |
| Robot Type | Unmanned Ground Vehicle (UGV), 4-wheel mobile robot |
| Developer | Clearpath Robotics (Canada) |
| Purpose | Research, field robotics, autonomous navigation, prototyping |
| Drive System | 4x4 differential drive (all-terrain) |
| Main Controller | Industrial PC (Intel-based) |
| Mobility | Indoor & outdoor terrain |
| Operating System | Ubuntu |
| Middleware | ROS2 |
| Programming Languages | Python, C++ |
| Sensors(Default) | IMU, GPS, encoders |
| Optional Sensors | LiDAR, stereo/depth cameras |
| Perception Capability | Mapping, localization, obstacle detection |
| Navigation | Autonomous navigation (ROS2) |
| Communication | Wi-Fi, Ethernet, USB |